Автор:
Автор: 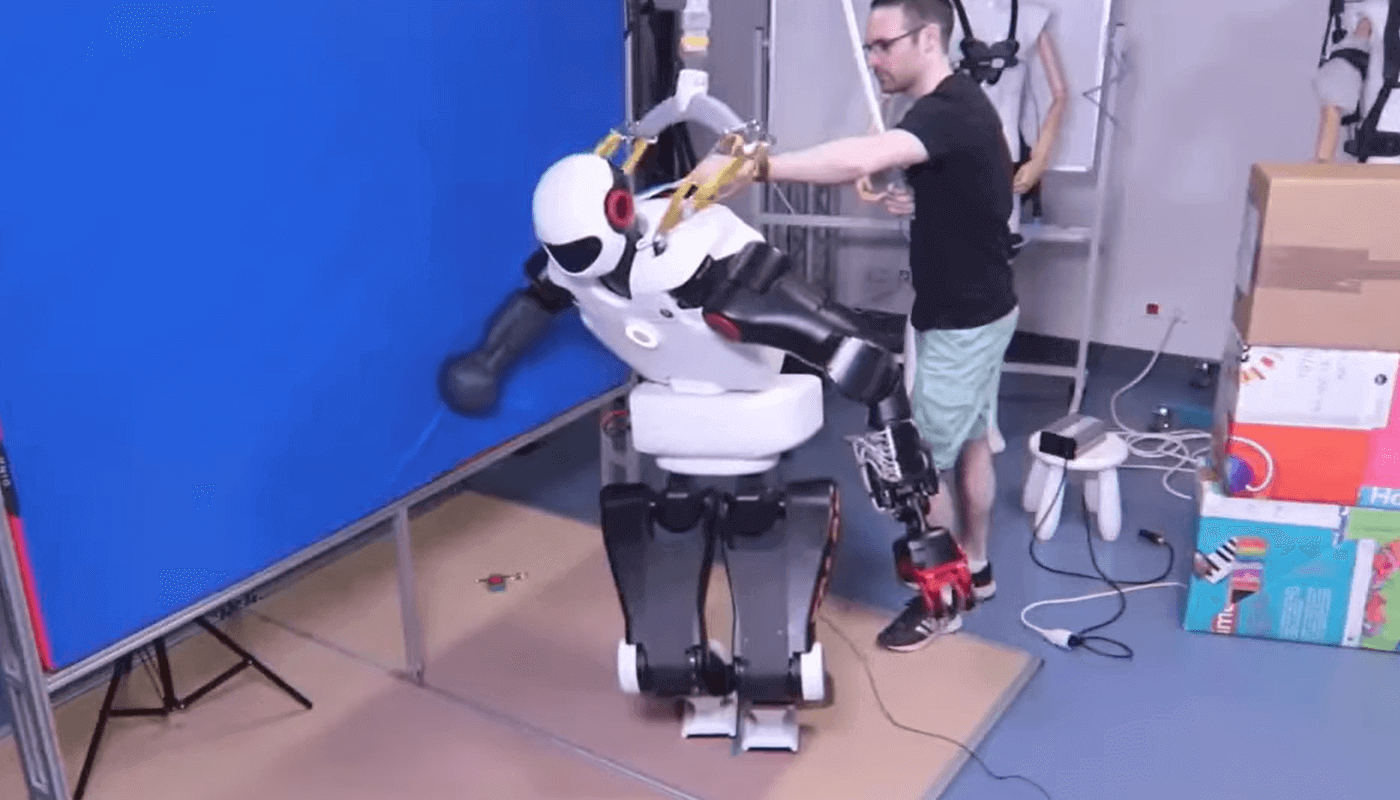
Создание роботов-гуманоидов подразумевает их использование в экстремальных ситуациях, таких как спасательные или военные операции. Эти миссии могут проходить и в зданиях, в том числе полуразрушенных. Такие локации одинаково опасны как для человека, так и для робота и предполагают высокую вероятность поломки или гибели андроида в результате падения.
Команда французских инженеров разработала метод D-Reflex (от Damage-Reflex), позволяющий человекоподобному роботу опираться на стену при падении, если повреждена или отключена одна из ног. Человек, потерявший точку опоры, инстинктивно выбрасывает руки, чтобы опереться и вернуть равновесие. Эта модель поведения лежит в основе метода D-Reflex, который помогает двуногому роботу не упасть, схватившись за соседнюю стену. Исследование опубликовано на arXiv.org.
Основная идея D-Reflex заключается в обучении нейронной сети. В процессе обучения было смоделировано более 882 тысяч ситуаций с разными вариантами опоры рукой, позы робота и повреждений ноги. Это позволило андроиду мгновенно определять точку на стене, в которую нужно упереться для сохранения равновесия. В результате, в трёх из четырёх случаев робот-гуманоид остаётся стоять, прислонившись к стене. Правда, пока это происходит в статичном положении, без движения, и на ровном полу.
В дальнейшей работе исследовательская группа планирует дополнить обучающий набор нейросети динамичными и сложными условиями: быстрой ходьбой по неровной поверхности, а также прыжками на одной ноге. В качестве опоры кроме стены также хотят использовать стулья, столы и другие предметы.