Автор:
Автор: 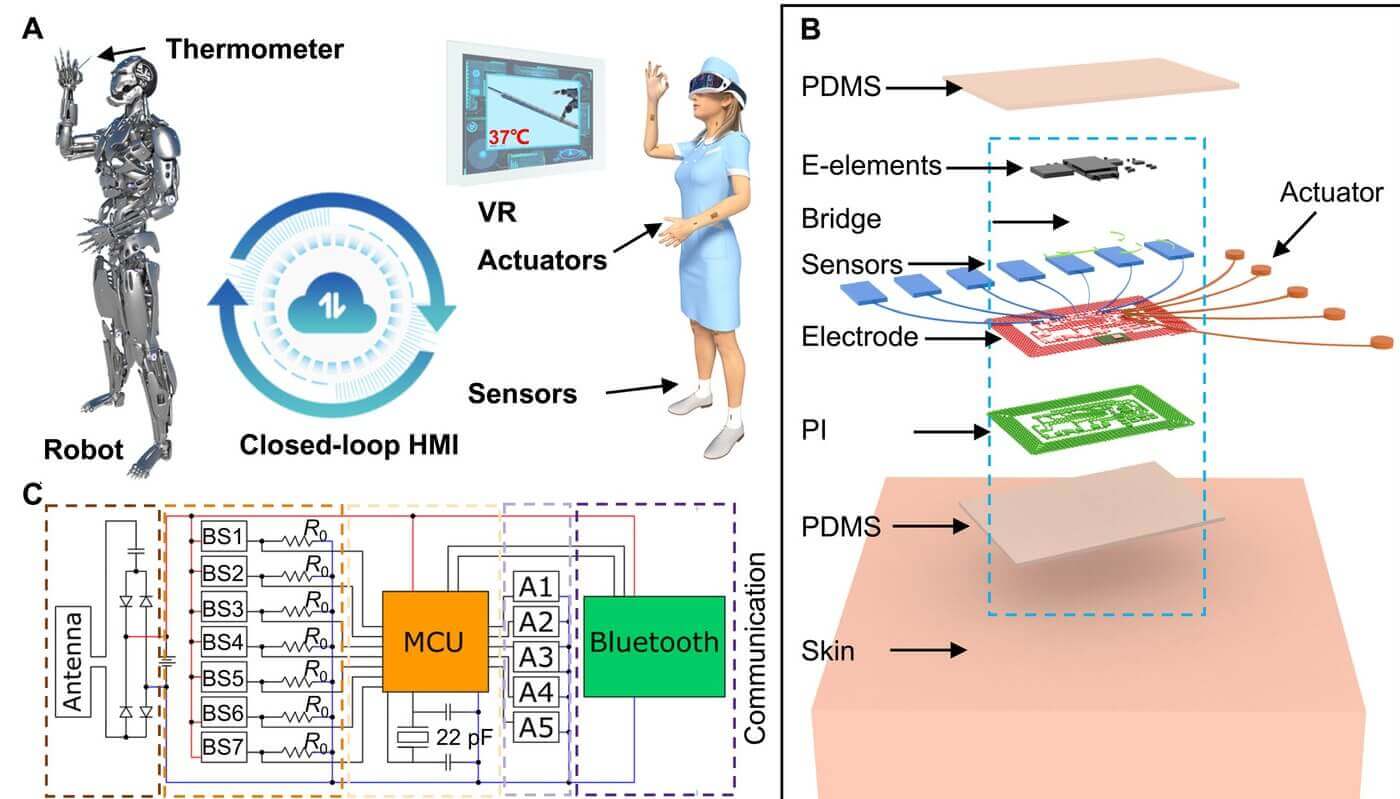
Группа исследователей из Городского университета Гонконга, Даляньского технологического университета, Университета Цинхуа и Университета электронных наук и технологий Китая разработала гибкий кожный пластырь, который может обеспечивать тактильную обратную связь между человеком и роботом. Учёные опубликовали свои результаты в журнале Science Advance.
Сейчас инженеры активно разрабатывают роботов, которыми может дистанционно управлять человек-оператор. Но, как отмечают исследователи, большинство таких систем громоздки и сложны в управлении. Также они, как правило, обеспечивают небольшую обратную связь, в основном, это видеопоток. В новом исследовании китайские учёные стремились разработать более удобную для пользователя систему. С этой целью они создали особую электронную кожу — гибкий пластырь, который можно прикрепить к коже человека-контроллера. Он улавливает как движения, так и факторы стресса, такие как скручивание и поворот. Новую эпидермальную систему назвали CL-HMI.
У патча есть датчики для считывания информации с собственных детекторов, беспроводные передатчики, чтобы отправлять получаемую информацию и небольшие вибрирующие магниты, которые помогают с тактильной обратной связью. Группы пластырей размещаются на коже оператора в важных местах, таких как сгиб на передней части руки над локтем. Некоторые датчики в пластыре состоят из проводов, расположенных зигзагообразно. Они вытягиваются всё прямее по мере того, как пластырь сгибается, предоставляя информацию о движении тела — например, сгибании руки в локте или её отпускании.
Все объединённые данные патчей позволяют оператору управлять удалённым роботом, не надев громоздкое снаряжение. Но в системе есть ещё кое-что: патчи также применяются к частям робота, чтобы оператор мог получать обратную связь. Например, нанесение пластырей на кончики пальцев робота позволит оператору почувствовать твёрдость объекта, удерживаемого роботом, благодаря крошечным вибрирующим магнитам.