 Автор:
Автор: 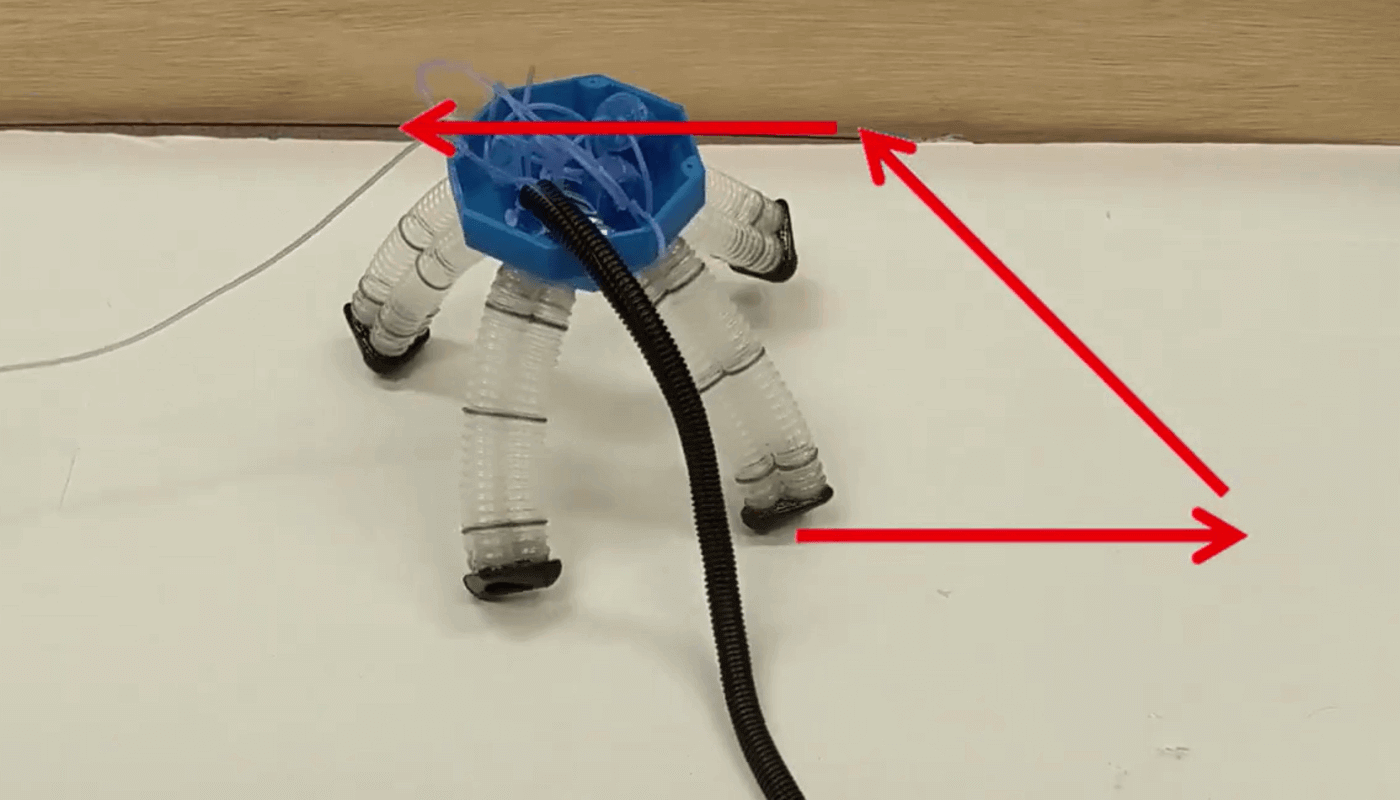
Американские инженеры создали прототип пневматического шагающего робота с применением мягких материалов, в котором нет электромеханических компонентов и электроники. Устройство управляется с помощью системы клапанов, образующих логические схемы и работающих только за счёт сжатых газов. Походка робота имитирует движения черепахи, он способен менять направление движения и работать автономно от баллона с углекислым газом. Роботы без электрических компонентов могут безопасно работать, например, в местах с высоким содержанием взрывоопасных газов, когда необходимо исключить возможность случайного возникновения искры, или в условиях, где недопустимо наличие металлических элементов, например, внутри работающих магнитно-резонансных томографов, говорится в статье, опубликованной в журнале Science Robotics.
Применение мягких материалов в конструкции роботов позволяет использовать их в случаях, когда требуется безопасное взаимодействие с человеком и окружением, например, в медицине. Кроме того, гибкость и податливость позволяет мягким роботам подстраиваться под сложные поверхности. Например, гибкие манипуляторы в виде щупальца могут захватывать предметы сложной формы, обвиваясь вокруг них.
Чтобы приводить мягких роботов в движение инженеры зачастую используют пневматические актуаторы, что объясняется невысокой сложностью создания таких механизмов и широкой коммерческой доступностью основных компонентов. Для работы пневматического актуатора с помощью насосов в герметичную камеру, расположенную внутри элемента конструкции мягкого робота, нагнетается избыточное давление из-за чего тот ассиметрично деформируется, сгибая или разгибая манипулятор.
Для работы системы из пневматических насосов и клапанов обычно используется дополнительное электрооборудование: электромоторы и соленоиды, а управление осуществляется с помощью микроконтроллеров. Однако, это может быть не всегда приемлемо, например, при работе в сильных магнитных полях или из-за опасности образования искр в условиях повышенного содержания взрывоопасных газов. Кроме того, электрооборудование и электронные компоненты могут ограничивать подвижность гибкого робота со множеством степеней свободы и не вписываться в концепцию мягкого устройства.
Для того чтобы обойти эти ограничения американские инженеры из Калифорнийского университета в Сан-Диего под руководством Майкла Толли (Michael Tolley) создали прототип шагающего пневматического робота с мягкими ногами, в конструкции которого нет электронных и электромеханических компонентов. Его актуаторы и система управления действуют только за счёт пневматики от одного и того же источника давления.
Демонстрационный прототип робота состоит из корпуса, выполненного с помощью 3D-печати из PLA-пластика, на котором под углом 45 градусов закреплены ноги, а также пневматические клапаны системы управления, соединенные трубопроводами. Каждая нога длинной 173 миллиметра состоит из трёх параллельных гофрированных трубок, которые образуют герметичные камеры. При увеличении давления в одной из трубок происходит изгиб конечности в противоположную сторону. Таким образом, нагнетая давление в каждую из трёх камер можно отклонять ногу робота в нужном направлении. Инженеры добились осциллирующего движения ноги, нагнетая и уменьшая давление последовательно в каждой из трех трубок, тем самым поднимая и опуская ногу по круговой траектории. Паттерн движения всех четырёх конечностей робота разработчики позаимствовали у африканской бокошейной черепахи, которая при ходьбе попарно передвигает лапы, расположенные по диагонали.
Система управления роботом состоит из соединенных в цифровые логические схемы клапанов. Хотя попытки использовать микрофлюидные логические элементы для создания прототипов мягких роботов осуществлялись и ранее, однако применить такой подход для сложнокоординированного движения шагохода инженерам удалось впервые.
Пневматические клапаны, действующие как логические инверторы, соединяются по три элемента в кольцевые генераторы, которые при подключении внешнего источника давления направляют поток газа последовательно в каждую из трех камер, попарно соединенных по диагонали ног. При этом в зависимости от варианта взаимного подключения каждой из двух пар ног к выводам генератора одна из них может шагать с запаздыванием по фазе относительно второй, имитируя тем самым последовательную работу диагональных пар лап черепахи. Таким образом, достаточно трёх клапанов, чтобы управлять всеми четырьмя ногами шагохода.
Однако такая схема работы не оптимальна, так как в ней возможно реализовать только фазы запаздывания 0, 120 и 240 градусов (при значении фазы 0 все ноги робота работают в унисон и не отрываются от поверхности), а в походке черепахи фаза в работе пар лап составляет около 180 градусов. Это оптимальное значение, при котором достигается максимальная скорость передвижения. Как оказалось такой фазы можно добиться, усложнив схему управления, добавив в неё второй кольцевой генератор и клапан подстройки фазы, который задействуется только для начальной настройки запаздывания пар ног относительно друг друга. Благодаря такой схеме удаётся получить оптимальную работу ног шагохода, но при этом возрастает вес робота, что негативно влияет на скорость его перемещения. Измеренная разработчиками скорость перемещения при значении угла фазы 180 составила 0.090 длины тела робота в секунду, тогда как максимальная скорость в неоптимальной конфигурации с тремя клапанами и фазой 120 градусов только 0.024 длины тела в секунду. Кроме того, добавление новых элементов увеличивает вес устройства и уменьшает надежность устройства, поэтому инженеры в экспериментах использовали в основном первую схему управления с одним генератором.
Разработчики продемонстрировали возможность шагохода двигаться во всех направлениях и даже разворачиваться. Для этого они добавили в схему бистабильный управляющий клапан, работающий по принципу двухполюсного переключателя на два направления (DPDT), с помощью которого можно организовать реверсивное направление работы кольцевых генераторов, меняя тем самым последовательность заполнения камер в ногах шагохода, а следовательно, и направление движения конечностей на обратное. Такой переключатель реверса, соединённый с вынесенным за пределы корпуса на штанге датчиком столкновения (тоже основанным на бистабильном клапане, который переключается при касании о препятствие), позволит существенно повысить автономность пневматического робота.
Большинство экспериментов с устройством разработчики выполняли с питанием сжатым воздухом от внешнего источника давления по трубопроводу. Однако робот может работать и от переносного источника энергии. Для этого инженеры использовали баллоны со сжатым углекислым газом. Небольшого баллона весом 57 граммов с регулятором давления до 140 килопаскаль хватает на 45 секунд автономной работы, а баллон весом 306 граммов позволяет роботу функционировать до четырёх минут.


