 Автор:
Автор: 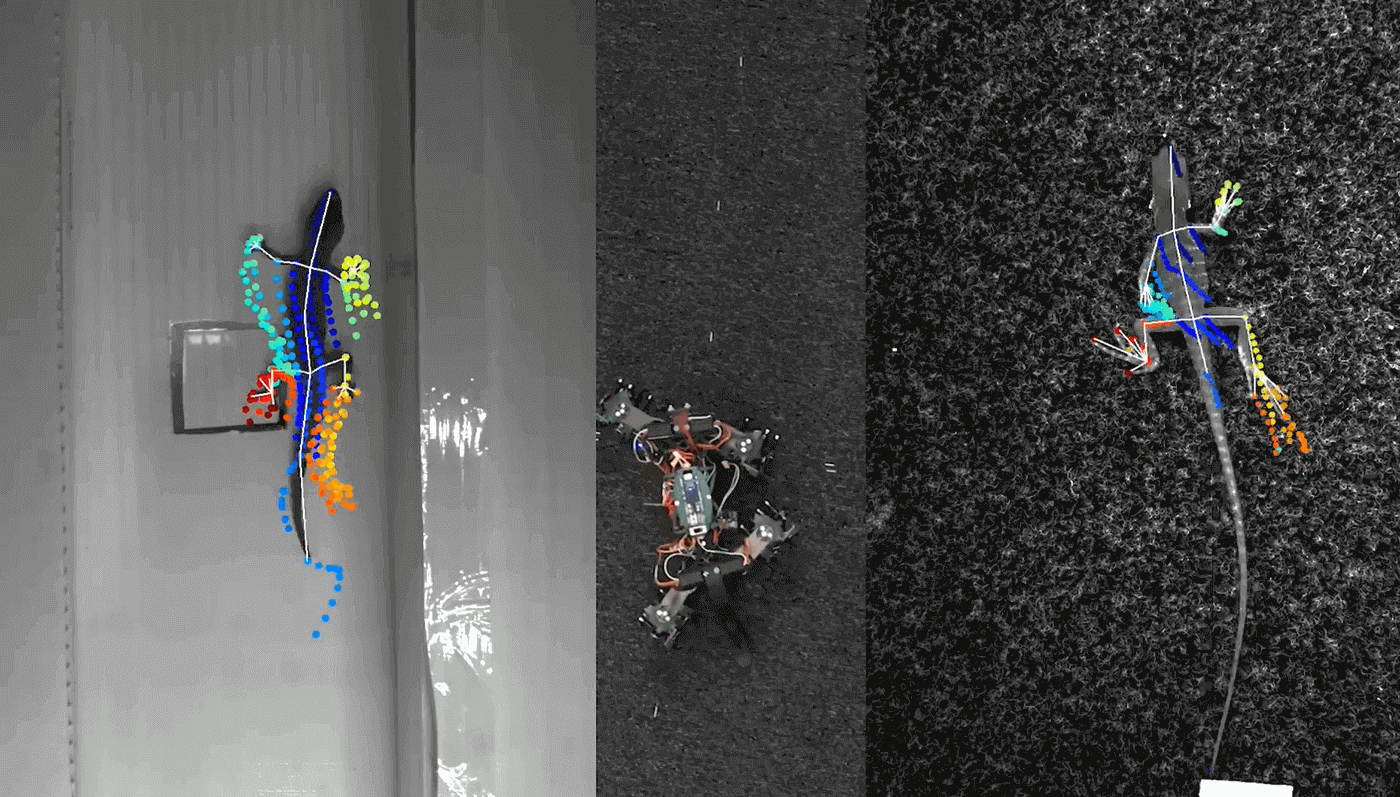
Австралийские инженеры разработали робота, способного передвигаться по вертикальным поверхностям. Для этого они сначала записали и проанализировали методами машинного обучения движения настоящих ящериц, — азиатского домового геккона и водяной ящерицы, а затем использовали полученные данные для настройки оптимальной конфигурации ног робота и его походки.
Устройство имеет четыре ноги и приводится в движение десятью сервоприводами. По словам разработчиков, робот с подобным способом передвижения может пригодиться для работы в труднодоступных местах, например при изучении сложного рельефа других планет, а также позволит лучше понять особенности двигательной системы животных. Статья опубликована в журнале Proceedings of the Royal Society B, препринт работы доступен на сайте bioarxiv.org.
Подход, когда при создании конструкций для роботов инженеры заимствуют идеи из природы, создавая устройства, имитирующие живые организмы или их отдельные органы, называют биомиметикой. Зачастую он позволяет не только получить более эффективные устройства, но и улучшить наше понимание того, как устроены и работают живые организмы.
Например, ящерицы способные карабкаться по вертикальным поверхностям, могут послужить отличным прототипом для шагающих роботов, которые обладая способностью передвигаться по наклонным и вертикальным рельефам смогут пробираться в труднодоступные места, куда невозможно добраться, используя более консервативных способы передвижения, например колеса.
С другой стороны, разработка робота, имитирующего походку лазающих ящериц, помогла бы лучше понять двигательные особенности этих животных, чья способность карабкаться по стенам требует оптимального решения конкурирующих задач поддержания высокой скорости перемещения при сохранении устойчивости.
Инженеры из австралийского Университета Саншайн-Коста под руководством Кристофера Клементе (Christofer J. Clemente) изучили походку ящериц и разработали прототип шагающего робота, способного взбираться по наклонным и вертикальным поверхностям. Благодаря возможности независимого управления отдельными элементами ног и «позвоночника» робота, инженерам удалось воспроизвести движения карабкающейся по стене ящерицы и проанализировать их эффективность.
Вес робота последней версии X-4 составляет около 330 грамм при размерах 280×180×65 миллиметров. Управление движением робота осуществляется с помощью 10 сервомоторов. Два отвечают за продольный изгиб спины робоящерицы, четыре — за поворот конечностей в плечах, и еще четыре нужны для подъема ступней ног, оснащённых когтями, над поверхностью. Угол установки каждой ступни можно изменять независимо с помощью винтов.
Жёсткий неподвижный хвост, длина которого равна половине длины тела робота, служит дополнительной точкой опоры при движении вверх. Для измерения пройденного расстояния и скорости на роботе установлен лазерный дальномер, а для определения ориентации в пространстве робот использует гироскоп. Кроме того, регистрируется потребляемый моторами ток. Управление сервомоторами, контроль координации движений и сбор данных с датчиков осуществляется платой Arduino micro с микроконтроллером Atmega168P-AU.
В качестве прототипа для робота были выбраны две особи ящериц — азиатский домовой геккон (Hemidactylus frenatus) и австралийская водяная ящерица (Intellagama lesueurii). Движения карабкающихся по стене животных были записаны на камеру и проанализированы с помощью алгоритма машинного обучения DeepLabCut, предназначенного для распознавания поз и оцифровки движения животных на видео. Полученные данные были использованы для создания и настройки конфигурации робота.
Тестирование робоящерицы проводилось на вертикальной и горизонтальной поверхностях с ковровым покрытием, за которое робот цепляется расположенными на ступнях когтями. Изменяя основные параметры, такие как скорость передвижения робота, угол установки ступней относительно продольной оси, изгиб позвоночника и диапазоны отклонения конечностей в плечах, инженеры испытывали способность устройства взбираться на стену и ходить по поверхности. При этом стабильность вертикального движения они оценивали по количеству успешно пройденных шагов без падений, соскальзывания или отклонения от первоначального направления движения, а по данным о потребляемом моторами токе оценивали энергозатраты.
Выяснилось, что оптимальная скорость перемещения робота лежит в пределах между 40 и 70 процентами от его максимально возможной скорости, ограничиваемой возможностями моторов. При больших значениях падает стабильность движения, а при скорости меньшей 40 процентов возрастают энергозатраты.
Анализ положений ступней робота показал, что существует две оптимальных области, при которых дистанция, преодолеваемая роботом за шаг, максимальна, а робот успешно преодолевает весь маршрут с вероятностью 100 процентов. При этом в одной из них ступни развернуты по направлению к телу робота, что не наблюдается в природе у настоящих ящериц. Это может быть связано как с ограничениями, накладываемыми свойствами костей, мышц и связок, так и с приспособленностью к конкретным условиям среды в процессе эволюции.
Значения углов поворота ступней во второй области равны 20 градусам для передних конечностей и 100 для задних. Близкие значения углов разворота ног наблюдаются у геккона (32 и 95), а вот у водяной ящерицы они отличаются от найденных оптимальных для лазанья величин и составляют в среднем 41 и 70 градусов для передних и задних ног соответственно. Авторы работы считают, что это может быть связано с тем, что вторая ящерица больше времени проводит на земле и потому менее приспособлена к лазанию, в отличие от геккона.
Максимальной скорости в 0,112 метра в секунду на горизонтальной поверхности робот достигает при одновременном сочетании изгибов спины и поворота ног в плечевых суставах, однако вклад спинного изгиба при этом минимален, а диапазон отклонения ног наоборот, максимальный. Подобный тип походки с небольшим вкладом спинного изгиба характерен и для настоящих ящериц, участвовавших в исследовании.
По словам авторов разработки, роботы, имитирующие способ передвижения ящериц, в будущем смогут применяться там, где классические колесные или гусеничные устройства неэффективны. Например, для исследования труднодоступных областей со сложным рельефом на Марсе и других планетах.


