Автор:
Автор: 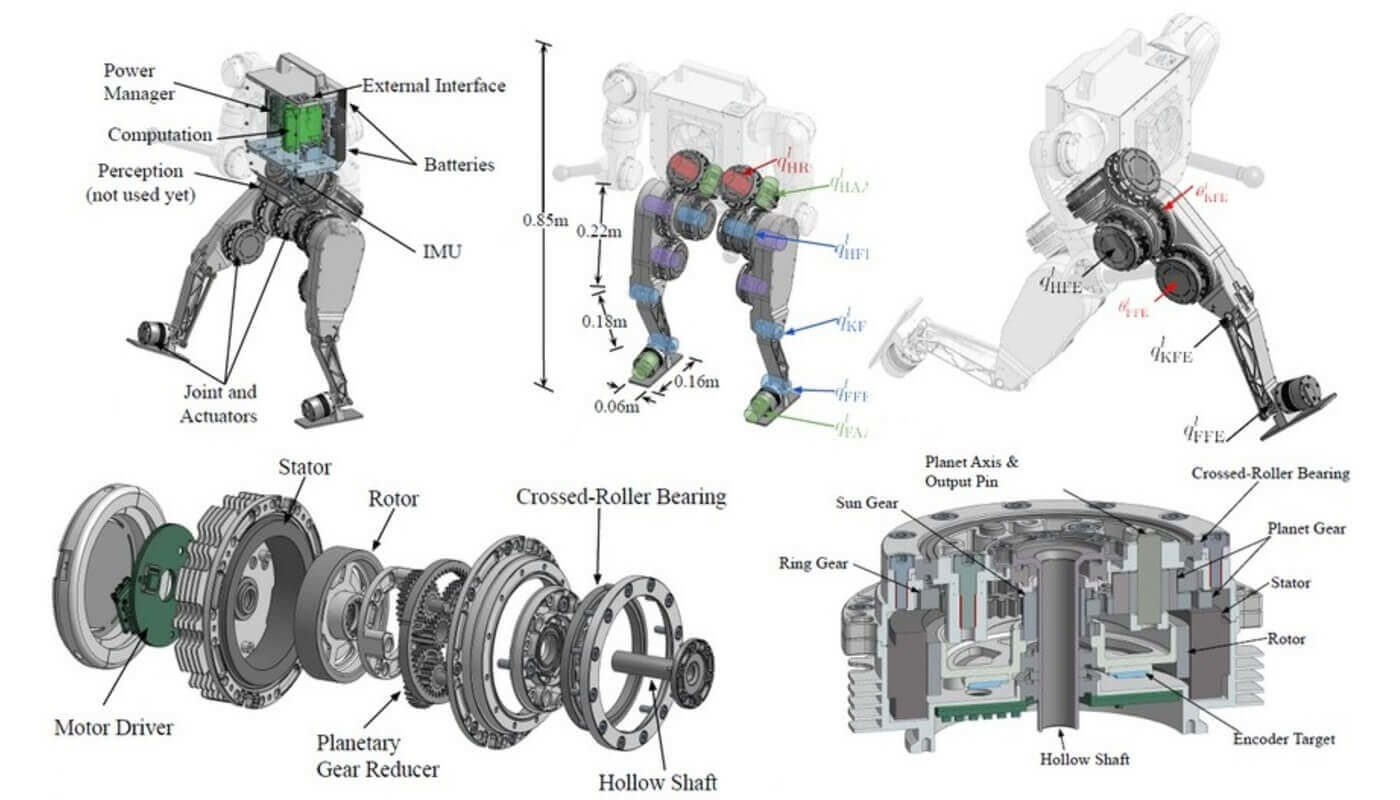
В последние годы наблюдается всплеск интереса к разработке человекоподобных роботов, в связи с чем инженерам и исследователям в этой области требуется удобная и недорогая платформа для быстрого тестирования алгоритмов управления. Большие роботы-гуманоиды, сопоставимые по размерам со взрослым человеком, не всегда подходят для этих целей. Они дорогие, громоздкие и тяжёлые, поэтому для работы с ними требуется несколько человек, а их мощные приводы могут привести к серьёзным травмам и поломкам в случае ошибки. Поэтому для исследований в области локомоции и управления человекоподобными роботами используются более компактные и дешёвые модели. Меньшие размеры и вес существенно упрощают работу и делают эксперименты безопаснее.
Одну из таких компактных гуманоидных платформ разработали инженеры из Калифорнийского университета. Исследование опубликовано на arXiv. Созданный ими Berkeley Humanoid — это небольшой робот с корпусом из алюминия, высотой 85 сантиметров и массой 16 килограмм. Робот состоит из торса и двух ног с шестью степенями свободы. В торсе робота находится компьютер, плата управления питанием, недорогой IMU-сенсор уровня мобильного телефона и два легко заменяемых аккумулятора в защищённом отсеке. Каждая нога имеет шесть актуаторов собственной разработки, которые непосредственно выступают в качестве суставов.
Все актуаторы подключены к бортовому компьютеру по протоколу EtherCAT, который обеспечивает высокую пропускную способность и минимальную задержку. Для внешних датчиков, таких, например, как камера глубины и лидар, предусмотрены порты USB и Ethernet. Конструкция Berkeley Humanoid направлена на уменьшение разрыва между моделированием поведения робота в симуляции и реальном мире. Все актуаторы робота — квазипрямые, то есть имеют трансмиссию с небольшим передаточным числом. Это упрощает моделирование их динамики. Для управления роботом используется минималистичный контроллер на основе обучения с подкреплением. Он использует только текущие показания встроенных сенсоров без учёта истории состояний, что позволяет сократить время обучения в симуляторе.
В экспериментах Berkeley Humanoid показал устойчивую походку в различных направлениях и с разной скоростью. Робот может ходить по траве, кирпичам, гравию и асфальту, преодолевать препятствия, включая небольшие ступеньки, и восстанавливать равновесие после сильных толчков. В одном из испытаний, например, робот смог подняться по крутому и узкому неасфальтированному склону, покрытому камнями, что непросто даже для человека. Кроме ходьбы Berkeley Humanoid может также выполнять прыжки на одной и двух ногах. В будущем инженеры планируют дооснастить робота руками с четырьмя степенями свободы и улучшить характеристики актуаторов так, чтобы робот смог выполнять более динамичные задачи, такие как сальто назад.