Автор:
Автор: 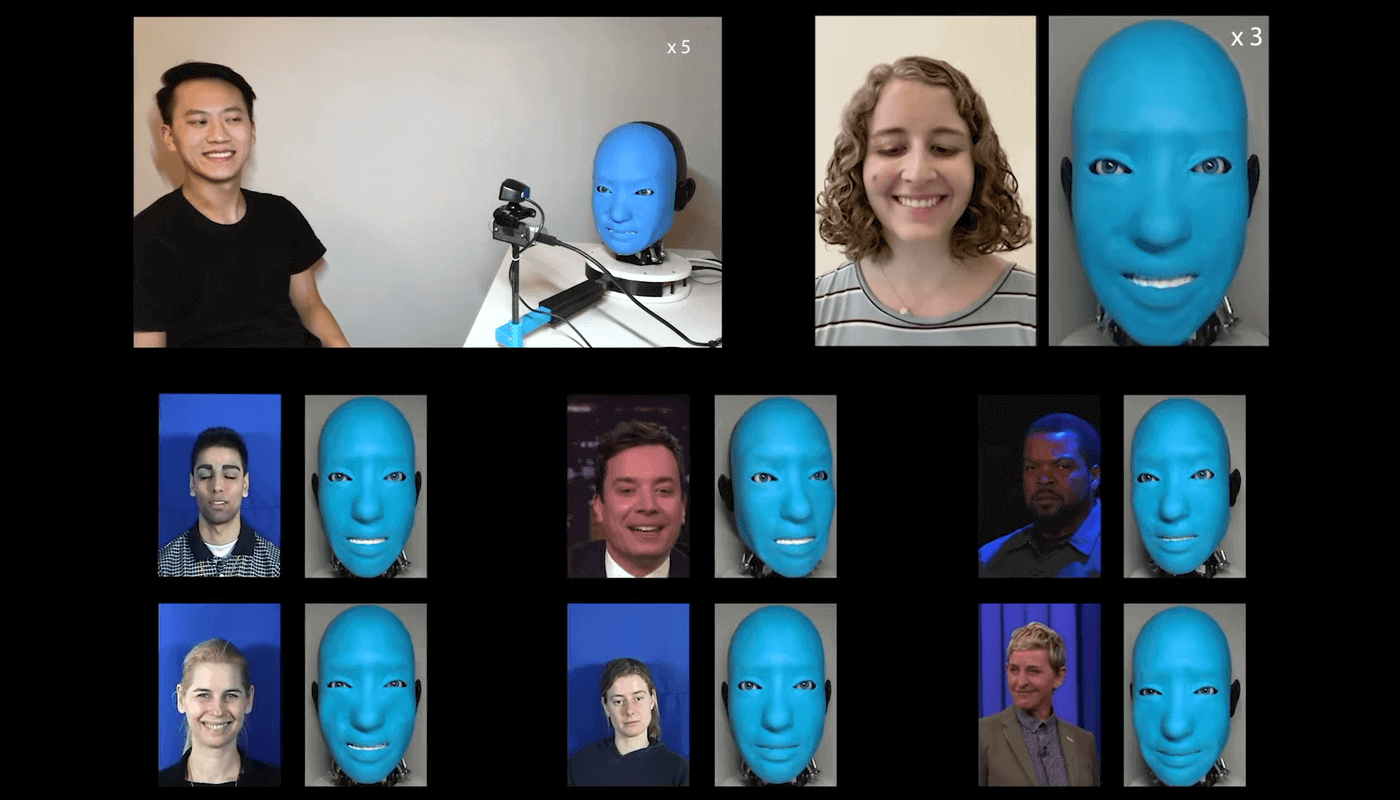
Используя искусственный интеллект, исследователи из Колумбийской школы инженерных и прикладных наук (США) научили автономного робота EVA с мягким и выразительным лицом правильно реагировать на выражения лица человека, который находится рядом. Исследование опубликовано в журнале ScienceDirect.
Несколько лет назад студенты из Колумбийской школы инженерных и прикладных наук сконструировали робота EVA как бестелесный бюст. EVA может выражать шесть основных эмоций: гнев, отвращение, страх, радость, печаль и удивление, а также множество более тонких эмоций, используя искусственные «мускулы» (т. е. кабели и двигатели), которые воздействуют на определённые точки на лице EVA, имитирующее движения более чем 42 крошечных лицевых мышц.
«Самая большая проблема при создании EVA заключалась в разработке системы, которая была бы достаточно компактной, чтобы поместиться в пределах человеческого черепа, но в то же время достаточно функциональной, чтобы воспроизводить широкий спектр мимики», – отметили авторы разработки.
Чтобы решить эту проблему, команда в значительной степени полагалась на 3D-печать для производства деталей сложной формы, которые легко и эффективно интегрировались с черепом EVA. После нескольких недель перетягивания кабелей, чтобы заставить EVA улыбнуться, нахмуриться или выглядеть расстроенным, команда заметила, что синее, лишенное тела лицо EVA может вызывать эмоциональные отклики у их коллег по лаборатории: робот улыбнулся человеку, и тот рефлекторно улыбнулся в ответ.
Инженеры хотели добиться обратного действия и запрограммировали искусственный интеллект, который будет управлять движениями лица EVA. Они создали мозг EVA, используя несколько нейронных сетей глубокого обучения. Мозгу робота требовалось овладеть двумя навыками: во-первых, научиться использовать свою собственную сложную систему механических мышц для создания любого конкретного выражения лица, а во-вторых, знать, какое выражение лица принимать, «считывая» лица людей.
Чтобы научить EVA, как выглядит его собственное лицо, разработчики сделали многочасовые видеозаписи, на которых EVA создает серию случайных лиц. Затем, как человек, наблюдающий за собой в Zoom, внутренние нейронные сети EVA научились сочетать движение мышц с видеозаписью собственного лица. Теперь, когда у EVA было примитивное представление о том, как работает её собственное лицо, робот использовал вторую нейросеть для сопоставления своего собственного образа с изображением человеческого лица, снятого на его видеокамеру. После нескольких доработок и итераций EVA приобрела способность считывать жесты человеческого лица с камеры и реагировать, отражая выражение лица этого человека.
Исследователи отмечают, что EVA – это лабораторный эксперимент, и сама по себе мимикрия всё ещё далека от сложных способов, которыми люди общаются с помощью мимики. Но когда-нибудь такие перспективные технологии могут найти полезные приложения в реальном мире. Например, роботы, способные реагировать на самые разные языки человеческого тела, могут быть полезны на рабочих местах в больницах, школах и домах.