 Автор:
Автор: 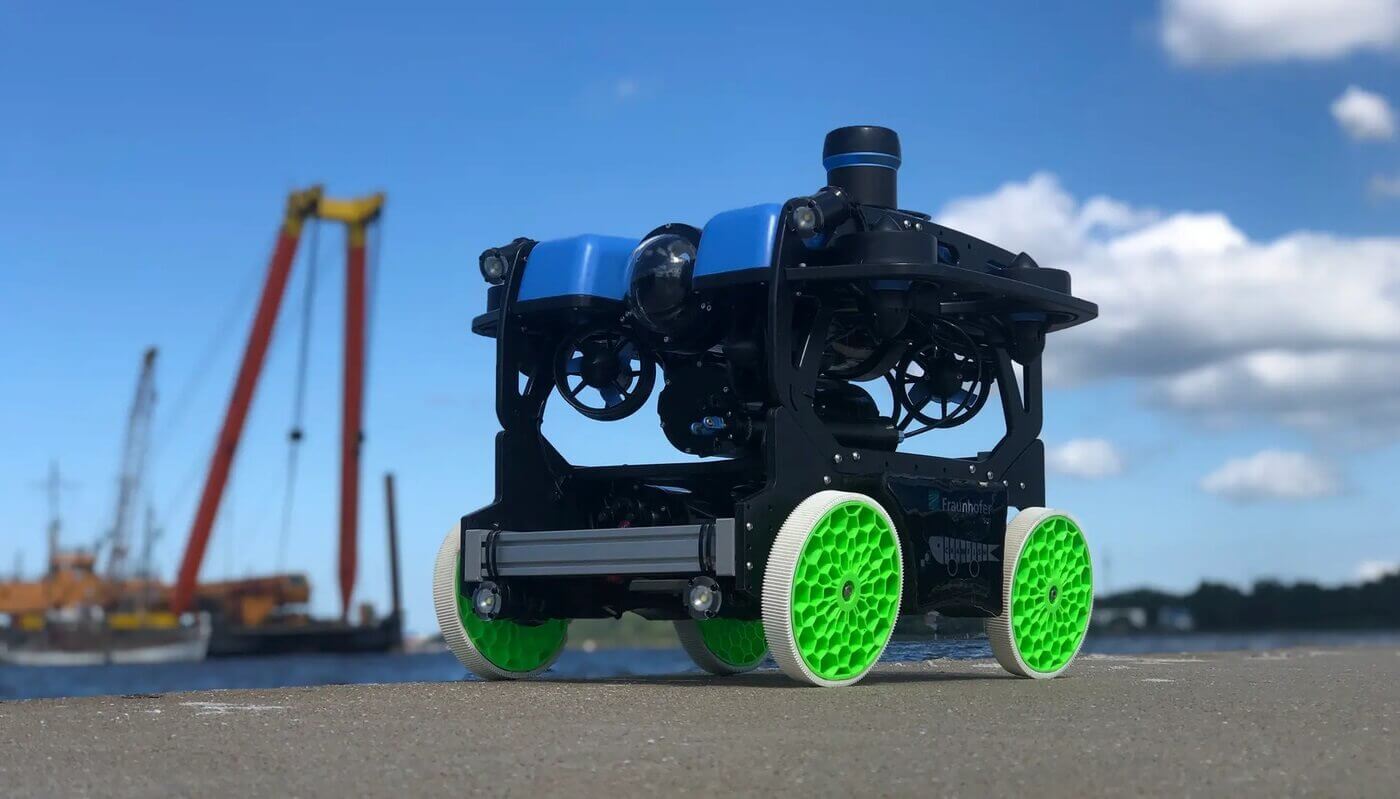
Подводные части нефтяных платформ, оффшорных ветроэнергетических установок и других морских инженерных сооружений периодически нуждаются в осмотре, антикоррозийной обработке и проверке целостности сварных швов. Обычно эти подводные работы выполняются промышленными водолазами, однако уже в недалёком будущем их могут заменить роботы. Немецкие инженеры разработали подводного робота Crawfish для технического обслуживания подводной части морских сооружений, таких, например, как ветрогенераторы, нефтяные платформы, волновые и приливные электростанции.
Робот имеет гибридную конструкцию. Он состоит их двух компонентов. Сверху располагается подводный дрон. Нижняя часть — модуль с четырьмя эластомерными колёсами, каждое из которых вращается собственным электромотором и может управляться отдельно от остальных. Здесь же располагается различное оборудование, необходимое для работы: камера, щётка для очистки поверхности и нанесения антикоррозийного состава, и считывающая головка для активации и снятия показаний датчиков. Наборы сенсоров устанавливаются в различных точках конструкции и обнаруживают трещины в сварных швах с помощью ультразвуковых волн.
Масса Crawfish составляет 22 килограмма, поэтому для его спуска в воду не требуется кран — с этим легко справятся два человека. Управление осуществляется дистанционно через кабель. В толще воды робот передвигается за счёт винтов, расположенных на дроне, а достигнув объекта, Crawfish разворачивается на 90 градусов и прижимается колёсами к поверхности сооружения. Винты обеспечивают прижимную силу до 90 ньютон. Благодаря этому робот может ездить по стенам и опорам сооружений под водой, используя привод колёс.
Оператор использует бортовую камеру робота для удалённой инспекции технического состояния поверхности объекта в реальном времени. В случае обнаружения нарушения антикоррозионного покрытия, его восстанавливают, нанося слой защитного материала. Для этого используется дистанционно управляемая щётка, которая размазывает по обрабатываемой поверхности поступающую в неё через трубку антикоррозионную краску. На одном заряде батареи при движении по вертикальной поверхности с включенными винтами, обеспечивающими прижимную силу в 50 ньютон, робот может проработать 25 минут. Время свободного плавания — 60 минут. Максимальная глубина, на которую способен погрузиться Crawfish, составляет 50 метров.


