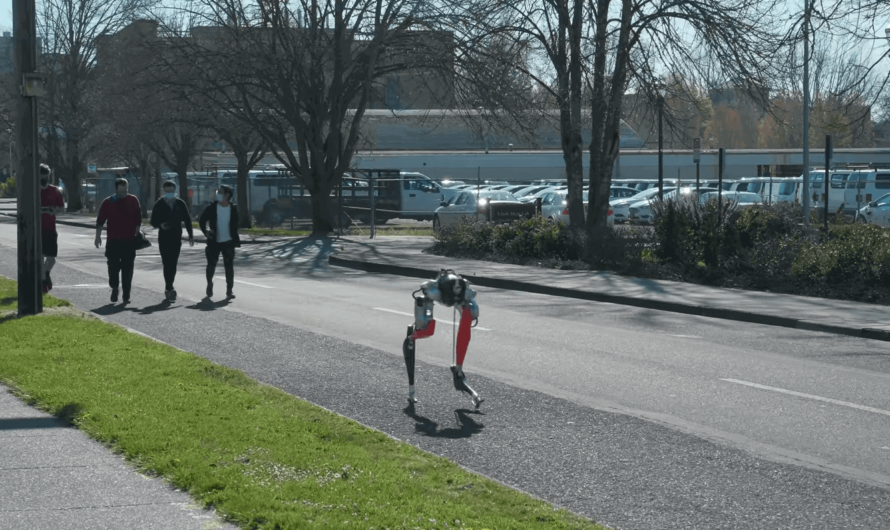
Создан фреймворк для роботов, который строит безопасный маршрут на основе движений человека
Ученые разработали фреймворк для роботов, который выстраивает безопасные маршруты по неструктурированной местности только на основе движений человека-оператора.