Автор:
Автор: 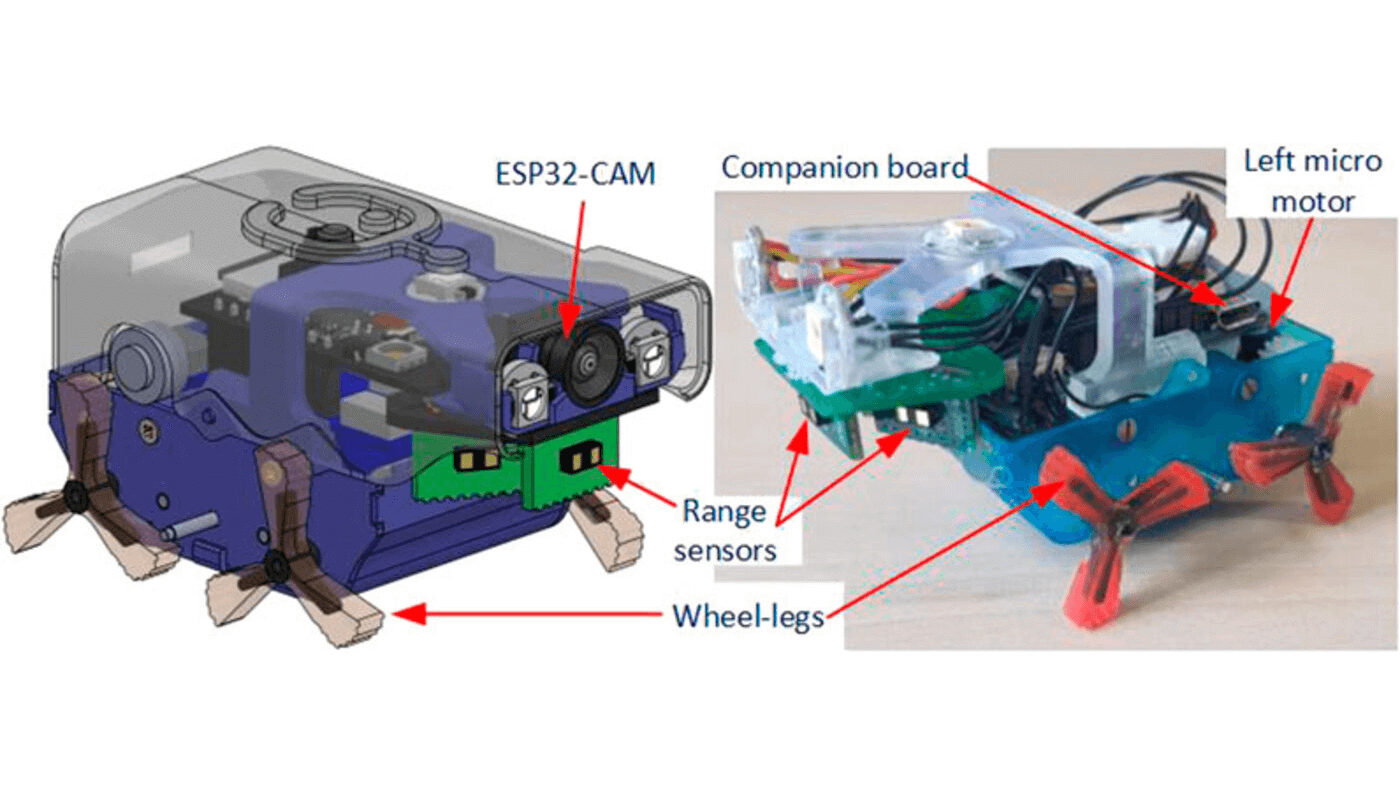
Под улицами практически каждого города пролегают лабиринты трубопровода для воды, канализации и газа. Регулярный осмотр этих труб на наличие утечек и ремонт обычно требуют их выкапывания, что не только дорого, но ещё затрудняет дорожное движение и доставляет другие неудобства жителям города. Чтобы решить эту проблему, ученые из Университета Лидса (Великобритания) разработали робота с искусственным интеллектом, который может пробираться через самые узкие трубопроводные сети и собирать изображения повреждений и засоров. Описание разработки опубликовано в журнале Frontiers in Robotics and AI.
Подземные сети представляют собой довольно неблагоприятную среду для роботов: спутниковая навигация там не работает. Сами роботы должны быть миниатюрными, чтобы протискиваться в трубы. Значит, их нужно оснащать очень простыми двигателями, датчиками и компьютерами, а также маленькими батарейками. Робот, получивший имя «Джоуи», весит всего 70 граммов, может самостоятельно исследовать трубопроводные сети и не нуждается даже в камерах для навигации. Он передвигается на напечатанных на 3D-принтере «ногах-колесах», которые позволяют катиться по ровной поверхности, а также преодолевать небольшие препятствия. Энергоэффективные датчики «Джоуи» измеряют расстояние до стен, стыков труб и углов, а камера и фонарь позволяют фиксировать неисправности в сети трубопроводов.
Испытания показали, что робот может самостоятельно найти путь через экспериментальную сеть труб, включающую Т-образные соединения, левые и правые повороты, тупики, препятствия и прямые участки. В среднем «Джоуи» удавалось исследовать около одного метра трубопровода чуть более чем за 45 секунд. Он легко перемещался вверх и вниз по наклонным трубам, покрытых песком или липким гелем. Датчиков было достаточно, чтобы позволить роботу двигаться без потребности включать камеру или использовать энергоёмкое компьютерное зрение. Всякий раз, когда батарея разряжалась, «Джоуи» возвращался в исходную точку, чтобы подзарядиться.
Пока у «Джоуи» есть один недостаток: он не может перевернуться, если случайно упадёт на спину. Авторы разработки предполагают, что следующий прототип сможет преодолеть эту проблему. Кроме того, они планируют сделать роботов водонепроницаемыми, чтобы те смогли функционировать в трубах, полностью заполненных водой. В дальнейшем учёные планируют создать рой маленьких роботов, которые будут работать на основе более крупного робота по имени «Канга». Его оснастят более сложными датчиками и инструментами для ремонта трубопровода. Итоговая цель разработчиков — создание системы, которая сможет проверять и контролировать состояние обширных трубопроводных сетей.