 Автор:
Автор: 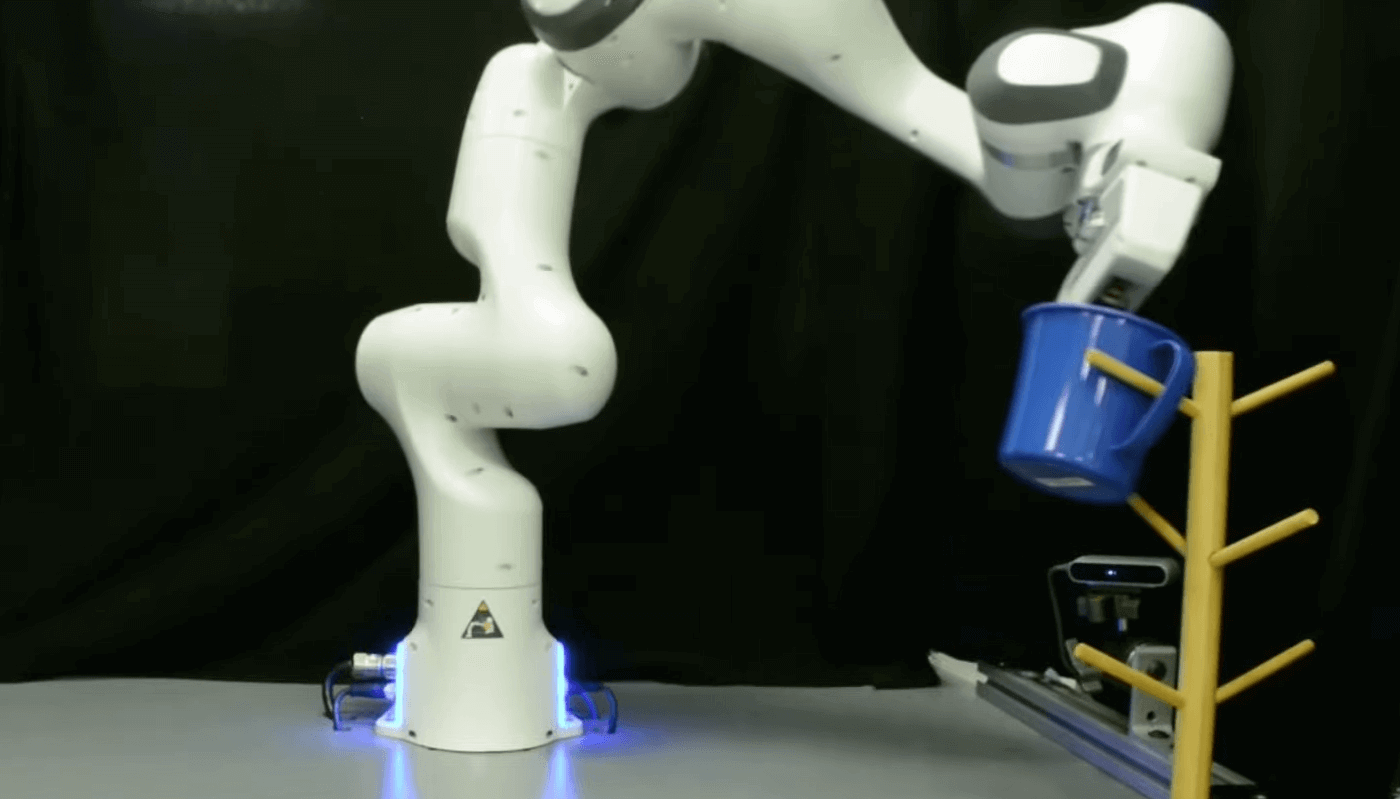
Исследователи из Массачусетского технологического института разработали новый алгоритм, для которого нужно, чтобы человек несколько раз показал, как выполнить задачу и этого будет достаточно, чтобы перепрограммировать робота. Новый метод машинного обучения позволяет роботу поднимать и манипулировать неизвестными ранее объектами, которые находятся в рандомных позах. За 10–15 минут робот будет готов выполнить новую задачу. Ознакомиться с проектом можно по ссылке.
По словам авторов, в подходе они использовали нейронную сеть, которая специально разработана для восстановления форм 3D-объектов. С помощью всего нескольких демонстраций система распознает геометрию предмета. Авторы организовали симуляцию с использованием реальной роборуки. Они показали, что их система может эффективно манипулировать кружками, мисками и бутылками, расположенными в случайных позах. Авторы использовали всего 10 демонстраций, чтобы обучить робота.


