 Автор:
Автор: 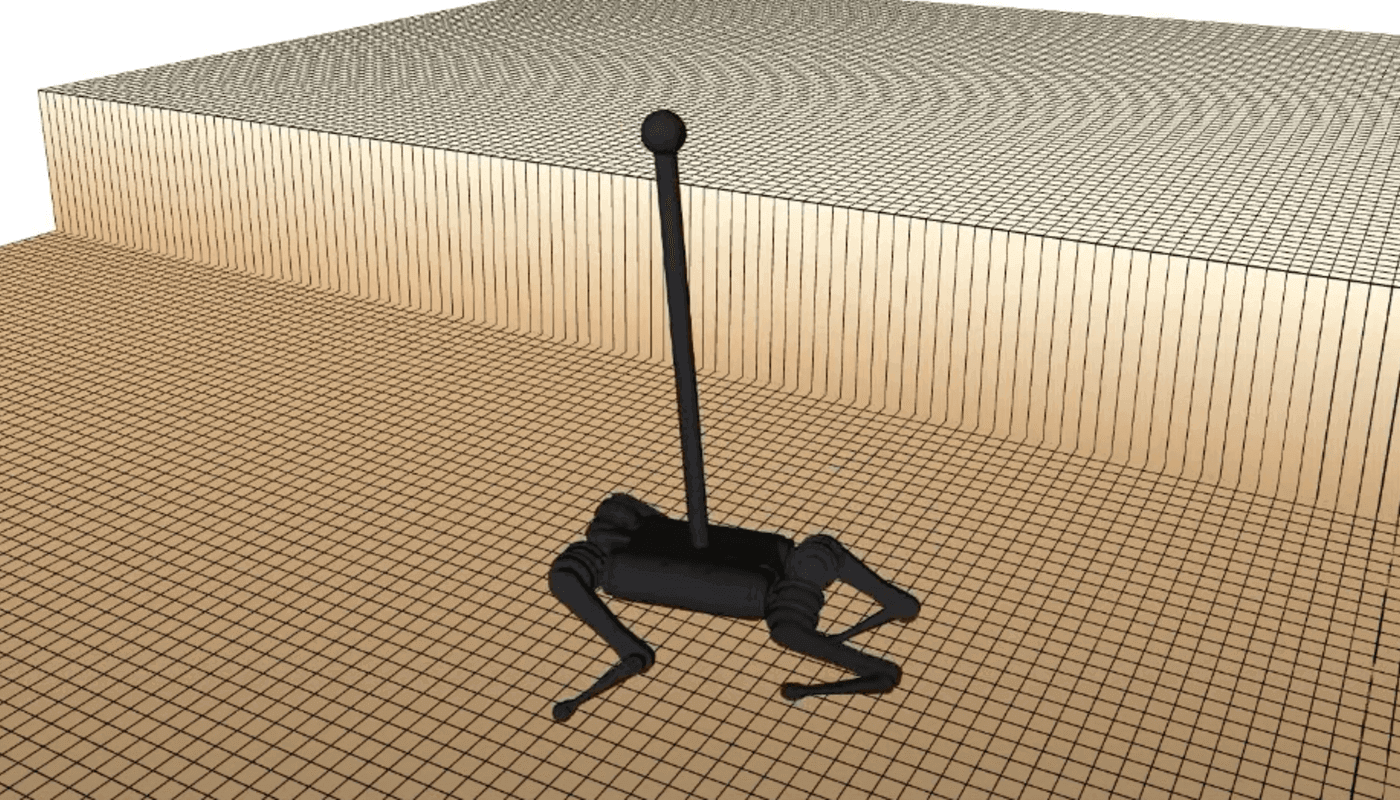
Группа исследователей из университета Карнеги-Меллон представила два новых метода, которые направлены на улучшение передвижения шагающих роботов по скалистой или экстремальной местности. За основу были взяты врождённые способности проприоцепции и механика хвоста животных. Учёные пояснили, что основная цель работы — вывести шагающих роботов из идеальных лабораторных в реально существующие условия, где они сталкиваются со сложными рельефами, каменистыми склонами и дорожными бордюрами. Исследование опубликовано на arXiv.
От проприоцепции животных к проприоцепции роботов
Многие животные, в том числе кошки и другие представители семейства кошачьих, передвигаются след в след, что позволяет им приземляться и сохранять равновесие на разных поверхностях. Учёные попытались точно воспроизвести эту модель для роботов, соединив проприоцепцию с планированием движений. Проприоцепция — это ощущение относительного положения частей тела и их движения, иными словами — ощущение своего тела.
В результате роботы почувствовали окружающую обстановку и стали двигаться точнее, при этом собирая информацию о положении своего тела, действиях и местонахождении. Проприоцепция преодолевает ограниченность системы компьютерного зрения, на которую негативно влияют датчики шума, препятствия, отражение света на близлежащих объектах и слабое освещение.
У животных и людей проприоцепция развита на генетическом уровне. До сегодняшнего момента роботы собирали информацию об окружающей среде с помощью системы технического зрения, получая данные с камер, лидаров и других наружных датчиков. Вместо этого исследователи предложили считывать информацию с датчиков (моторов, энкодеров, устройств инерционно измерительных систем), встроенных внутрь. Полученные данные позволяют роботу определять поскользнулся он или падает, и регулировать свои движения, избегая опрокидывания. Основное преимущество системы заключается в том, что она более устойчива к шуму окружающей среды. Самое сложное — контроль и планирование в условиях неопределённости, когда проприоцепция ощущает аварийную ситуацию.
Зачем роботу хвост
В дополнение к предложенной проприоцептивной системе исследователи создали компьютерную модель контроля искусственного хвоста, схожую с движениями хвоста животных при ориентировании в окружающей обстановке. Многие животные, например кошки, используют хвост для поддержания баланса при прыжках и скачках, а также для быстрого передвижения. Гепарды используют хвост для скоростного перемещения, замедления и быстрых разворотов, а белки для баланса при перепрыгивании с ветки на ветку. Разработчики метода применили эту идею, добавив хвост четвероногим роботам для сохранения баланса при потере точки опоры и падении.
Учёные также создали систему контроля, которая позволяет шагающим роботам координировать работу искусственного хвоста с ногами, сохраняя баланс даже в тех случаях, когда одна или обе ноги отрываются от земли. Это значительно улучшает определение местоположения робота на неровной или пересечённой местности, при этом максимально увеличивая эффективность в узких и маленьких пространствах.
Исследователи оценили свои подходы по планированию движения серией симуляций. Результаты выглядят многообещающими: биотехнологические методы проприоцепции и управления хвостом для демонстрационных моделей роботов уменьшают вероятность скольжения и падения, а также одновременно улучшают способность безошибочно передвигаться в экстремальном и меняющемся рельефе местности.
Перспективность методов
Новые методы планирования движения могут применяться и тестироваться на реальных шагающих роботах и позволять им исследовать неблагоприятные условия более достоверно, уменьшая вероятность столкновения и падения. Учёные в дальнейшем планируют протестировать предложенные методы на реальной технике, чтобы дооснастить роботов для поисково-спасательных работ, мониторинга окружающей среды и других реальных задач на сложных рельефах.
В ближайшие цели разработчиков входит:
- Улучшение конструкции для моделирования и контроля хвостов роботов. Это уменьшит вероятность столкновения частей робота между собой или с окружающей средой.
- Расширение методов для более сложных ландшафтов, таких как узкие ущелья и каменные ступеньки. На данном этапе они работают на простых рельефах, на более сложных ноги роботов могут спотыкаться и зависать. В таких случаях контроллер опускает туловище робота для поддержания стабильности.


