 Автор:
Автор: 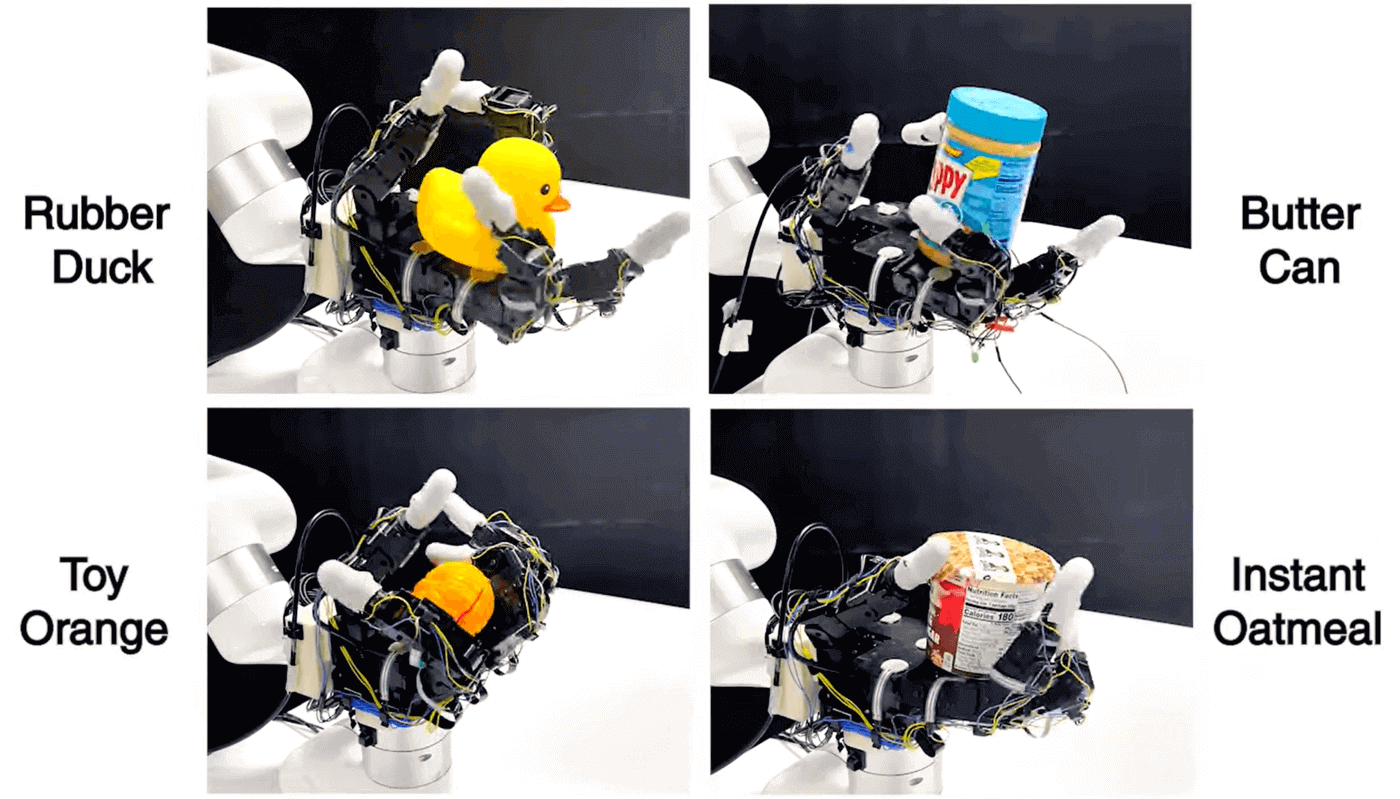
Инженеры из Калифорнийского университета изучили возможность роботов выполнять задачи по мелкой моторике наподобие людей. Созданный учёными прототип роботизированной руки умеет вращать объекты разных форм и текстур вокруг своей оси в нескольких направлениях, не роняя и не повреждая их. При этом робот функционирует только на тактильных данных и не использует зрение. Результаты исследования опубликованы по ссылке.
Учёные отказались от базовой системы сбора информации об объектах, которую обычно используют сложные роботизированные руки, заменив её на более доступную и простую в обслуживании. У их прототипа руки-робота четыре пальца и ладонь, на которых в общей сложности закреплено 16 дешёвых сенсорных датчиков. Сенсоры собирают информацию в простой бинарной системе: касается их предмет или не касается.
Часто для создания таких роботов используют несколько чипов на кончиках пальцев, которые распознают всю информацию об объекте: его текстуру, форму, особенности поверхности. Они дорогие и сложные в работе, поэтому установить на прототип большое количество таких датчиков не получается. Отсюда меньшая поверхность соприкосновения объектов с сенсорами и меньшая чувствительность, из-за чего робот стопорится, роняет или недостаточно крепко держит предметы. С помощью большого количества простых датчиков инженеры решили эту проблему и сделали свой прототип гораздо доступнее своих предшественников.
Работу над роботизированной рукой проводили в два этапа. Сначала тренировали программу с помощью компьютерной симуляции на виртуальных объектах простой и неправильной формы. Система моделировала свои движения, отслеживала и запоминала положение всех суставов и после посылала сигнал о том, какое движение должно быть сделано следующим.
Затем испытания системы провели на реальном прототипе робота, усложняя задачу. Рука вращала знакомые по компьютерной симуляции предметы, например, небольшой куб. После этого рука вращала объекты неправильной формы, с которыми до этого система не сталкивалась: банка с арахисовым маслом, пластиковый апельсин и резиновая уточка. Последняя была самой сложной из-за большого количества деталей. Также робот смог вращать фрукты и овощи с гладкой скользкой поверхностью, не травмируя их нажатием и не выпуская из руки.
Авторы исследования считают, что подобные технологии задают робототехнике новое направление. Они делают эксперименты доступнее для лабораторий и расширяют рамки возможностей современных роботов, например, работу в полной темноте исключительно на тактильной информации без поступления визуальных данных.


