Автор:
Автор: 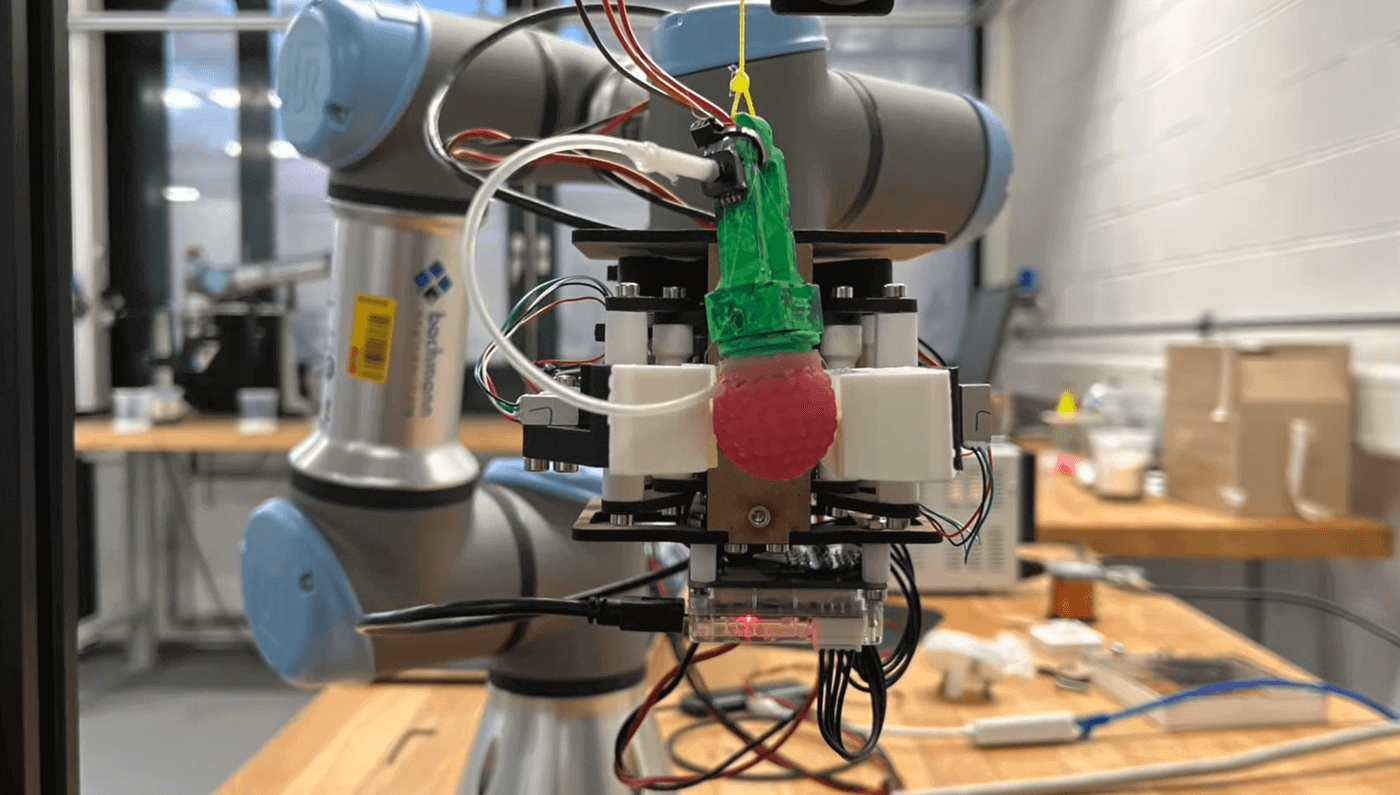
Малина — один из самых сложных для сбора и транспортировки сельскохозяйственных продуктов. Из-за нежности плодов портится слишком много продукта, прежде чем он попадёт на прилавок. Но что, если бы роботы, оснащённые передовыми приводами и датчиками, протянули руку помощи фермерам? Инженеры из Федеральной политехнической школы Лозанны попробовали решить эту задачу.
«Это захватывающая дилемма для нас, инженеров-робототехников. Сезон сбора малины настолько короток, а плоды настолько дороги, что просто невозможно портить их впустую, обучая роботов. Более того, стоимость и логистические проблемы тестирования различных вариантов в полевых условиях непомерно высоки. Вот почему мы решили провести тесты в лаборатории и разработать копию малины для обучения роботов-сборщиков», — говорит профессор Джози Хьюз.
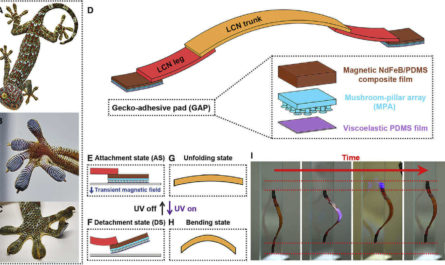
Для непосвящённых: сбор малины — непростая задача. Вы должны поддерживать ягоду снизу, аккуратно захватить её большим и указательным пальцами, затем осторожно потянуть, пока она не отделится от цветоложа. Чтобы помочь роботам-сборщикам привыкнуть к этому, инженеры создали силиконовую малину, которая сама сообщает роботу, правильное ли давление он приложил в том или ином случае. Свойства силиконовой малины можно изменять, чтобы имитировать разные стадии созревания. Благодаря этой обратной связи роботы могут обучаться собирать фрукты, не повреждая их.
«Наша сенсорная малина в сочетании с программой машинного обучения может научить робота применять нужное количество силы. Самое сложное — это научить робота ослаблять хватку после того, как малина отделится, чтобы фрукт не раздавился. С обычными роботами этого добиться сложно», — объясняет доктор Кай Джунге.
Копия малины — впечатляющий инженерный подвиг. Её мякоть сделана из силикона, а основа — из пластика, напечатанного на 3D-принтере. Она также содержит жидкостный датчик из мягкой силиконовой трубки для измерения силы сжатия. Тяговое усилие, удерживающее плод и основу вместе, создаётся двумя магнитами. Обучая роботов, учёным пришлось испортить немало образцов. Сейчас инженеры разрабатывают систему камер, которая позволит роботам не только «чувствовать» малину, но и «видеть», где она находится и готова ли она к сбору. Этим летом они планируют испытать своего робота-сборщика в полевых условиях.