Автор:
Автор: 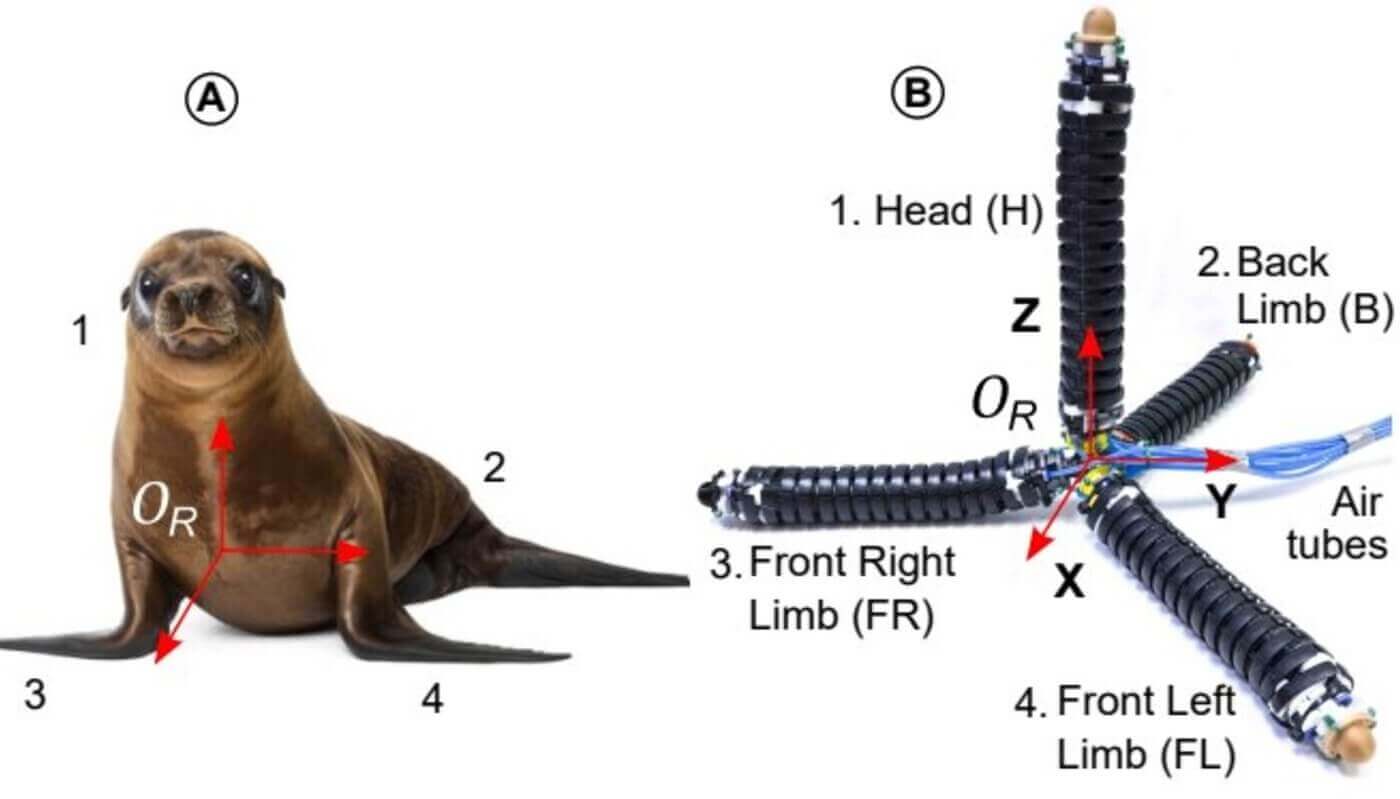
Современные прототипы роботов, которые умеют ползать или совершать волнообразные движения, ограничены прямолинейным перемещением и не могут разворачиваться. А более манёвренные роботы передвигаются с низкой скоростью. Группа учёных из Чикагского Университета Де Поля внимательно изучила неуклюжие покачивания ластоногих млекопитающих для воссоздания таких же движений у роботизированных тюленей. По словам учёных, похожей манеры перемещения нет у других современных роботов. Однако именно роботизированные тюлени с их покачивающимися и подпрыгивающими движениями могут однажды прийти на помощь людям в поисково-спасательных операциях. Исследование опубликовано на arXiv.
Робот-тюлень состоит из четырёх одинаковых конечностей длиной 24 см и диаметром 4 см каждая. Конечность представляет собой три силиконовые трубки, обёрнутые в твёрдую пластиковую оболочку. Трубки можно наполнять жидкостью, отчего конечности становятся жёсткими. В зависимости от наполнения жидкостью одной или нескольких трубок, робот может поворачивать каждую конечность в любом направлении. По словам исследователей, именно такого разнообразия движений не хватает современным прототипам роботов.
Стоит отметить, что робот-тюлень в обратном направлении перемещается быстрее, чем вперёд. Скорость его передвижения задним ходом составляет почти 17 см в секунду, в то время как скорость при движении вперёд — 11 см в секунду. Учёные объясняют это тем, что большая часть веса тюленя сосредоточена в задней части тела, в то время как вес робота распределён равномерно. Поэтому, когда он движется вперёд, ему сложно сохранять вертикальное положение. А при движении в обратном направлении тело робота помогает ему поддерживать равновесие, противодействуя крутящему моменту, создаваемому его движением.
Учёные говорят, что у новой разработки основной целью было создать робота, который имеет больше степеней свободы, разнообразие траекторий движения, ловкие конечности и возможность несения полезной нагрузки. Что касается будущего роботов-тюленей, исследователи считают, что мягкие передвижные роботы обладают большим потенциалом для замены людей при выполнении опасных задач, таких как инспекция ядерных объектов, поисково-спасательные операции, а также будущие исследования планет.