Автор:
Автор: 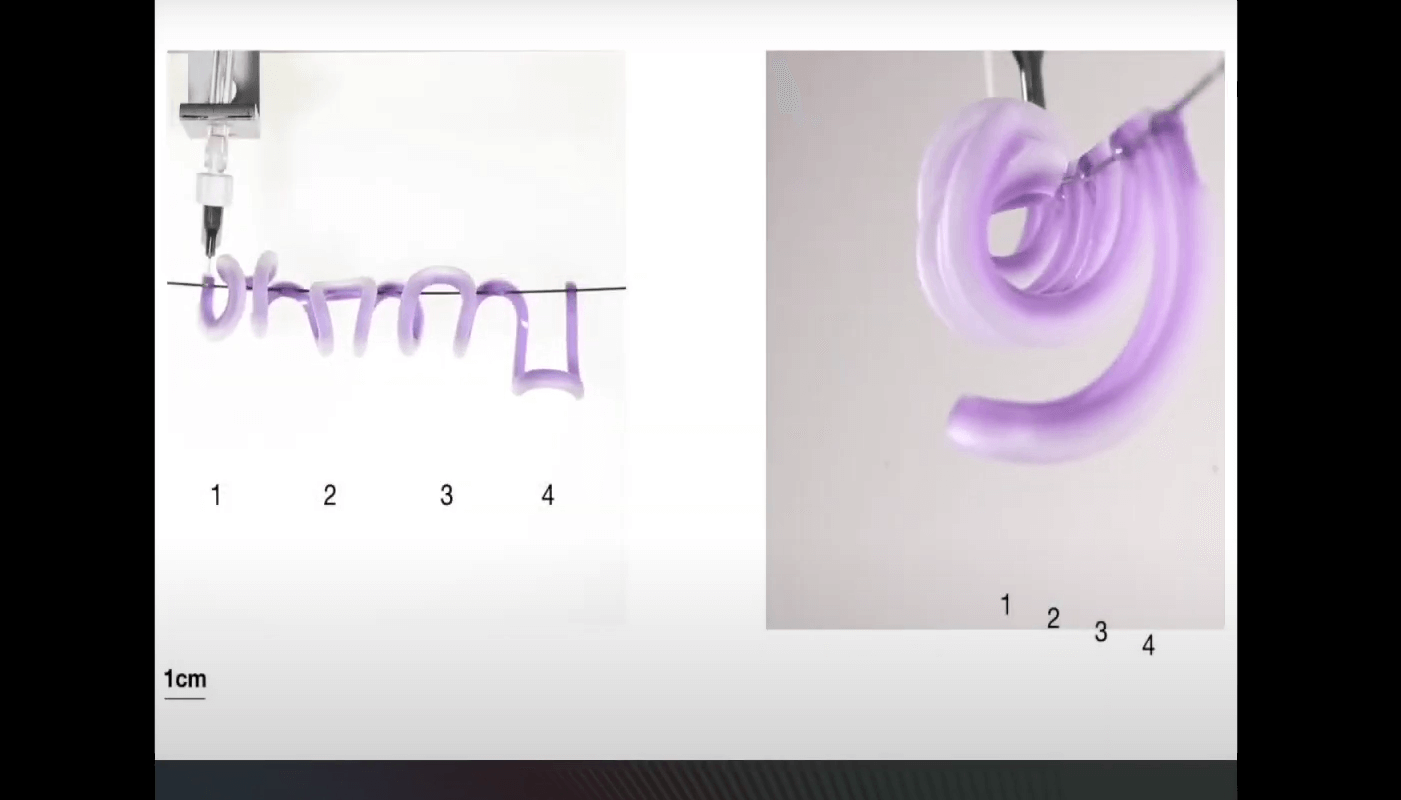
Исследователи из Принстонского университета (США) создали новый способ разработки мягких роботов. Для этого в эластичные полимеры закачивают воздух, как в шарики. Статья опубликована в журнале Nature.
Привычные для нашего понимания роботы используются во многих сферах, например на производстве автомобилей. Они изготовлены из твёрдых материалов, и поэтому не могут полноценно взаимодействовать с мягкими объектами, такими как люди или фрукты. Мягкие роботы изготовлены из более эластичных материалов, поэтому они могут использоваться в сферах, где нужны аккуратные прикосновения и тонкие манипуляции. Так, мягкие роботы могут собирать плоды, убирать хрупкие вещи с конвейерных лент, взаимодействовать с людьми. Они также могут быть использованы в медицине: в виде экзокостюмов, необходимых для реабилитации, или имплантов, которые можно было бы «обернуть» вокруг сердца и помочь ему таким образом биться.
Американские учёные смогли разрешить одну проблему, которая возникает при конструировании мягких роботов. Это необходимость контролировать, как материал, из которого они изготовлены, растягивается и деформируется. От этого зависит то, как робот будет двигаться. Во всех роботах есть компонент, который отвечает за движение, – исполнительное устройство. В отличие от «традиционных» роботов диапазон движения которых довольно ограничен, мягкие роботы перемещаются как угодно.
Новый метод создания мягких роботов основан на гидроаэромеханике. Учёные использовали жидкий эластомер, который при застывании становится эластичным и похожим на резину. Его вносят в простую форму: это может быть трубочка для питья или что-то более сложное (спираль или лепешка). Затем через материал продувают воздух так, чтобы по всей форме образовался пузырь. Под действием гравитации пузырь медленно поднимается вверх, а эластомер при этом стекает вниз. После застывания эластомер извлекается из формы. Его можно надувать воздухом, в результате чего тонкая плёнка на пузыре будет растягиваться и расширяться в сторону твердой части. Контролируя ряд факторов (толщина эластомера в форме, скорость стекания эластомера и время застывания), исследователи могут задавать характер движения будущего мягкого робота.
Используя этот метод, исследователи разработали несколько мягких роботов. Среди них звездообразные «руки», которые могут собирать ягоды, катушка, которая имитирует мышечные сокращения, и даже набор «пальцев», которые могут сгибаться один за другим, как если бы человек играл на пианино. Крупное преимущество этого способа изготовления мягких роботов — то, что он не требует применения дорогостоящей техники вроде 3D-принтеров или лазерных резаков. Кроме того, метод масштабируем. Это значит, что можно создавать исполнительные устройства длиной в несколько метров, и при этом толщина плёнки на пузыре будет составлять всего 100 мкм.
«Самое умное в этой идее — то, что можно задавать структуру, руководствуясь естественным движением жидкости, — прокомментировал Франсуа Галлер, профессор гидроаэродинамики в Федеральной политехнической школе Лозанны (Швейцария), не участвовавший в исследовании. — Этот процесс можно проводить при разных масштабах, в том числе при создании небольших устройств. Это очень волнующе, потому что традиционными методами очень трудно сделать такие трубки. У этого метода есть потенциал для изготовления очень мелких роботов».