Автор:
Автор: 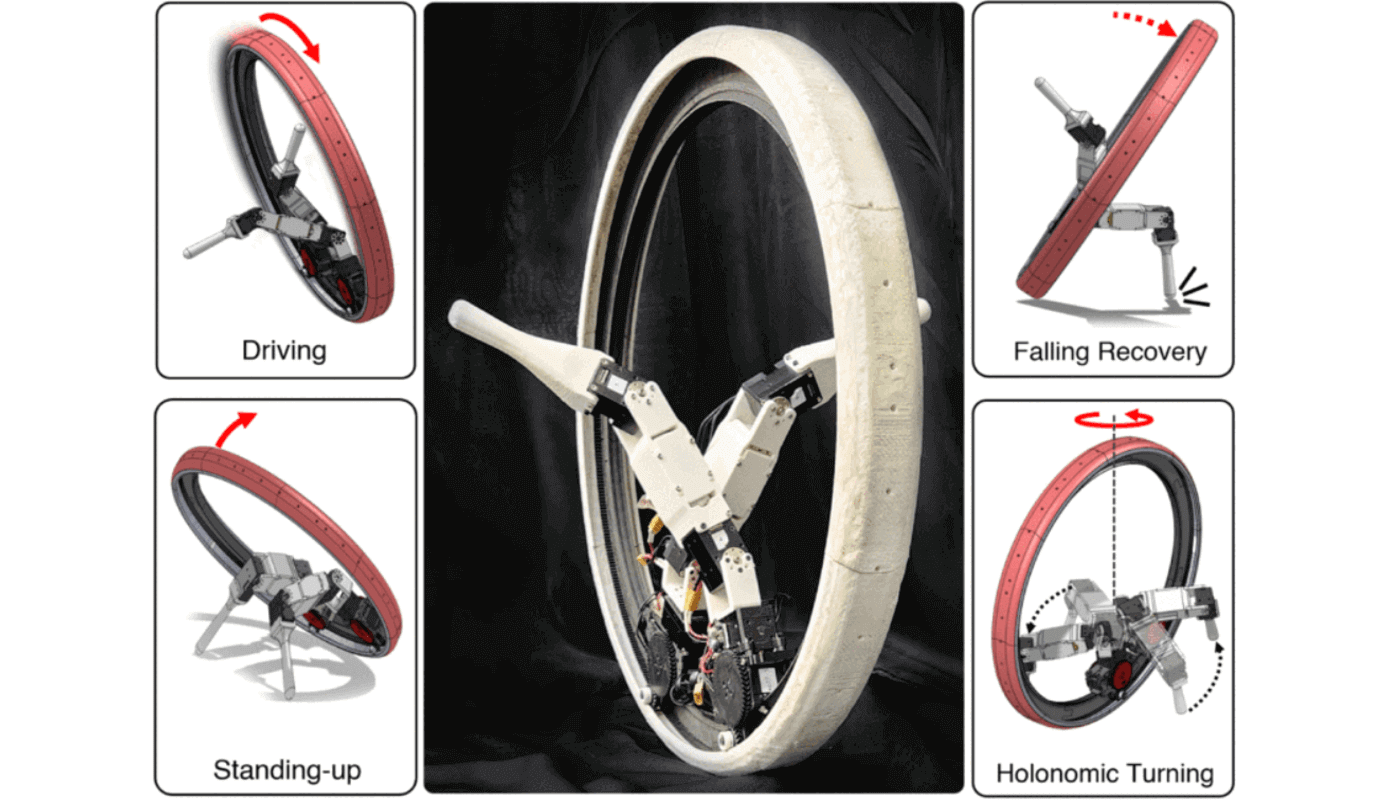
Моноцикл — известная с XIX века разновидность одноколёсного транспорта, он представляет собой большое колесо в форме кольца, внутри которого находится водитель. Подобно велосипедам, моноциклы обладают устойчивостью по направлению своего движения за счёт гироскопического эффекта и низкого центра тяжести, но неустойчивы в поперечном направлении. Эта особенность используется для управления поворотом моноцикла — водитель отклоняет центр тяжести в поперечном направлении, что вызывает изменение направления движения колеса из-за гироскопического эффекта.
Американские инженеры использовали схему моноцикла при разработке наземного колёсного робота Ringbot. Он построен на основе 3D-печатного колеса в форме кольца с внешним диаметром 515 миллиметров, которое покрыто снаружи термопластичным полиуретаном для лучшего сцепления с поверхностью. На внутренней поверхности кольца находятся направляющие канавки, в которых установлены два подвижных модуля идентичной конструкции. Масса робота — около 2,5 килограмма. Статья с описанием разработки опубликована в журнале IEEE Transactions on Robotics.
Каждый модуль оснащён двумя электромоторами с трансмиссией, шестерни которой входят в зацепление с зубьями на внутренней поверхности колеса. Модули могут двигаться независимо друг от друга и приводят моноцикл в движение подобно тому, как хомяк, бегущий внутри колеса, заставляет его крутиться. По сути, модули смещают центр тяжести в продольном направлении, заставляя колесо двигаться вперёд или назад. На каждом управляющем модуле также установлена нога с двумя подвижными соединениями и тремя степенями свободы. Обе ноги могут отклоняться в любую сторону относительно плоскости колеса и используются в первую очередь как средство для изменения центра тяжести в поперечном направлении, чтобы управлять поворотами робота во время езды. А когда он стоит на месте, то ноги работают в качестве опор. Также робот может развернуться, стоя на одном месте, перебирая ногами, а в случае падения набок ноги способны поднять робота.
Управляет роботом бортовой компьютер, который встроен в один из двух управляющих модулей. За измерение параметров текущего положения и состояния робота отвечают инерционно-измерительные устройства IMU. Между собой два управляющих модуля связаны витым кабелем, который не препятствует их независимому движению. В каждом из модулей есть пара встроенных аккумуляторов. Один из них используется для работы электромоторов, ответственных за движение, а второй служит для питания приводов ноги. Во время тестов Ringbot смог разогнаться до максимальной скорости в пять километров в час и проехать на одном заряде аккумуляторов три километра, то есть проработал в течение 37 минут. Также испытания показали, что большой диаметр колеса помогает роботу лучше преодолевать препятствия и неровности. Разработчики предполагают, что с учётом большого диаметра колеса, во внутреннем пространстве можно будет разместить полезную нагрузку и использовать робота, например, в сервисах доставки.